Hello,
For a project we are considering buying a TRB245. There will be 11 pcs of RS485 ModBus RTU sensors connected to the TRB245 (each has a load of 0.1 units). I have the following questions:
If I understand well, the TRB245 can poll ModBus RTU slaves (their registers) and can compare them to predefined values.
-
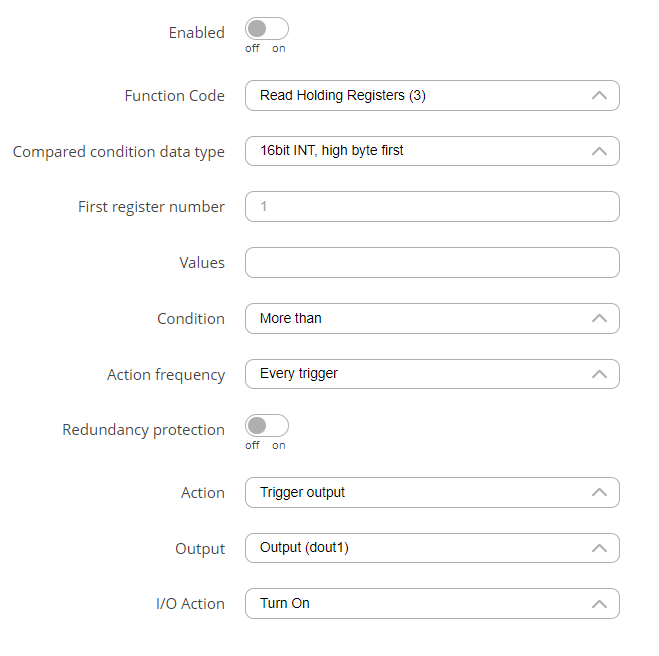
Is it possible to have as “action” to change an output from 0 to 1? The manual only lists two “actions”: SMS and ModBus Request.
-
If the answer is yes to question nr 1, is it possible to have at least twenty comparisons and “actions” to run in paralel?
-
Is it possible to change the comparison value (or to delete the condition) from a remote server (via 4G) through some kind of API?
About the load possibilities:
- Wat is the maximum number of ModBus RTU Slaves that can be connected to a TRB245?
Thanks,
Hello,
Yes, this would be configured in Modbus Alarms, and the configuration would look like so:
Yes, multiple Modbus Alarms can be configured.
Yes, although this would require some Linux/API knowledge. Using JSON-RPC you could run an UCI command to change the value that the Modbus Slave values are being compared to. More information can be found here and here.
The RS485 bus is rated for maximum of 32 devices. However, the maximum number will depend on the number of requests and alarms that are present on each device.
Best regards,
Hello,
Thank you very much for this very detailed answer.
In the meanwhile, I was trying on a RUT241 how to run programs written in Golang and the result was successful (I built a “hello” app with a cross-compiler and shrank it with upx to roughly 376 kBytes!). Which means I will be able to run my existing programs with not many changes.
Regards,