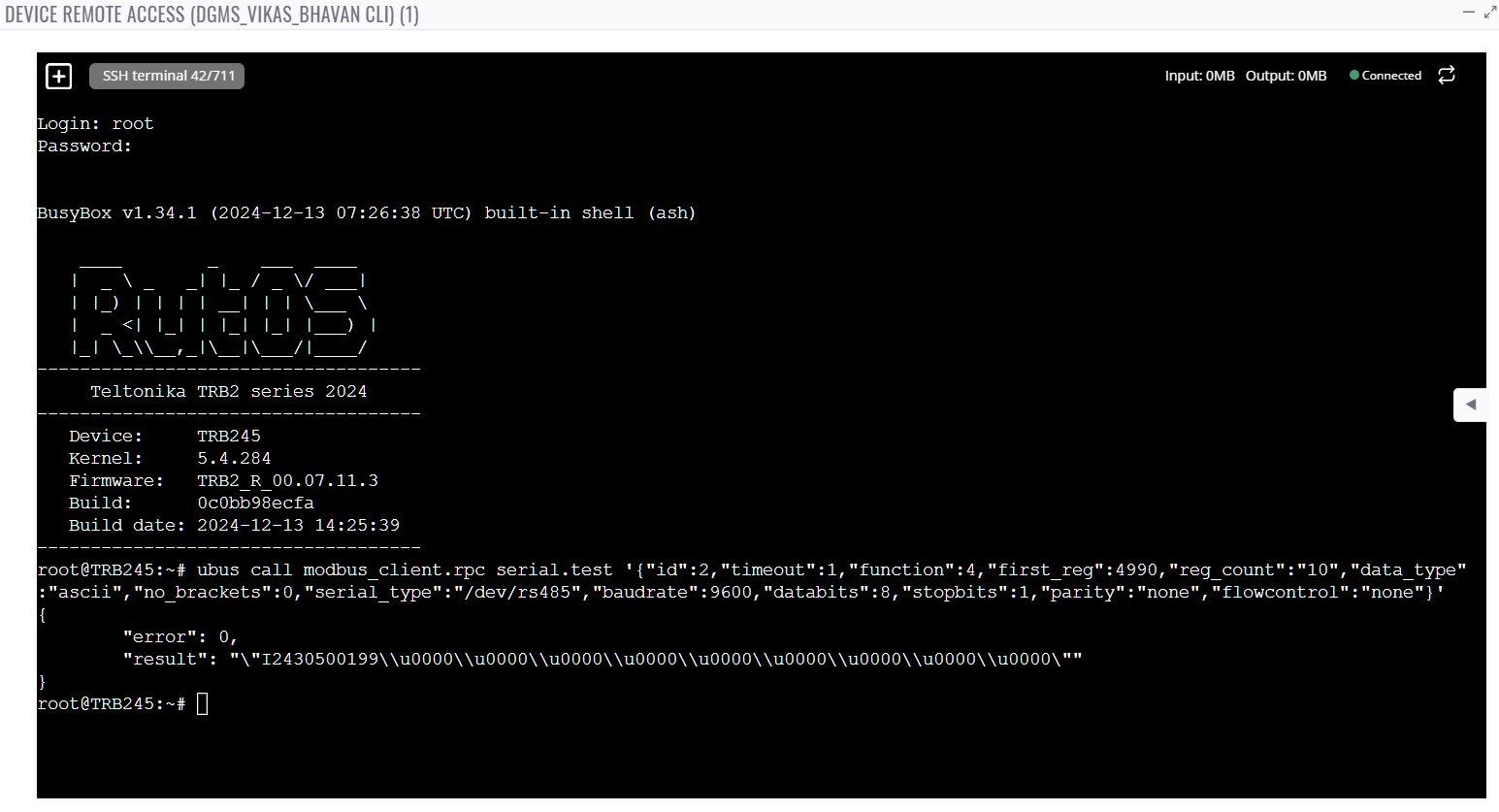
Please find below the ubus commands we were using for sensors and plc data polling from respective modbus serial clients. Now we have upgraded to the latest firmware available on teltonika website and found that the same ubus commands are not giving expected output values after polling real-time data from serial clients. Support to resolve this issue.
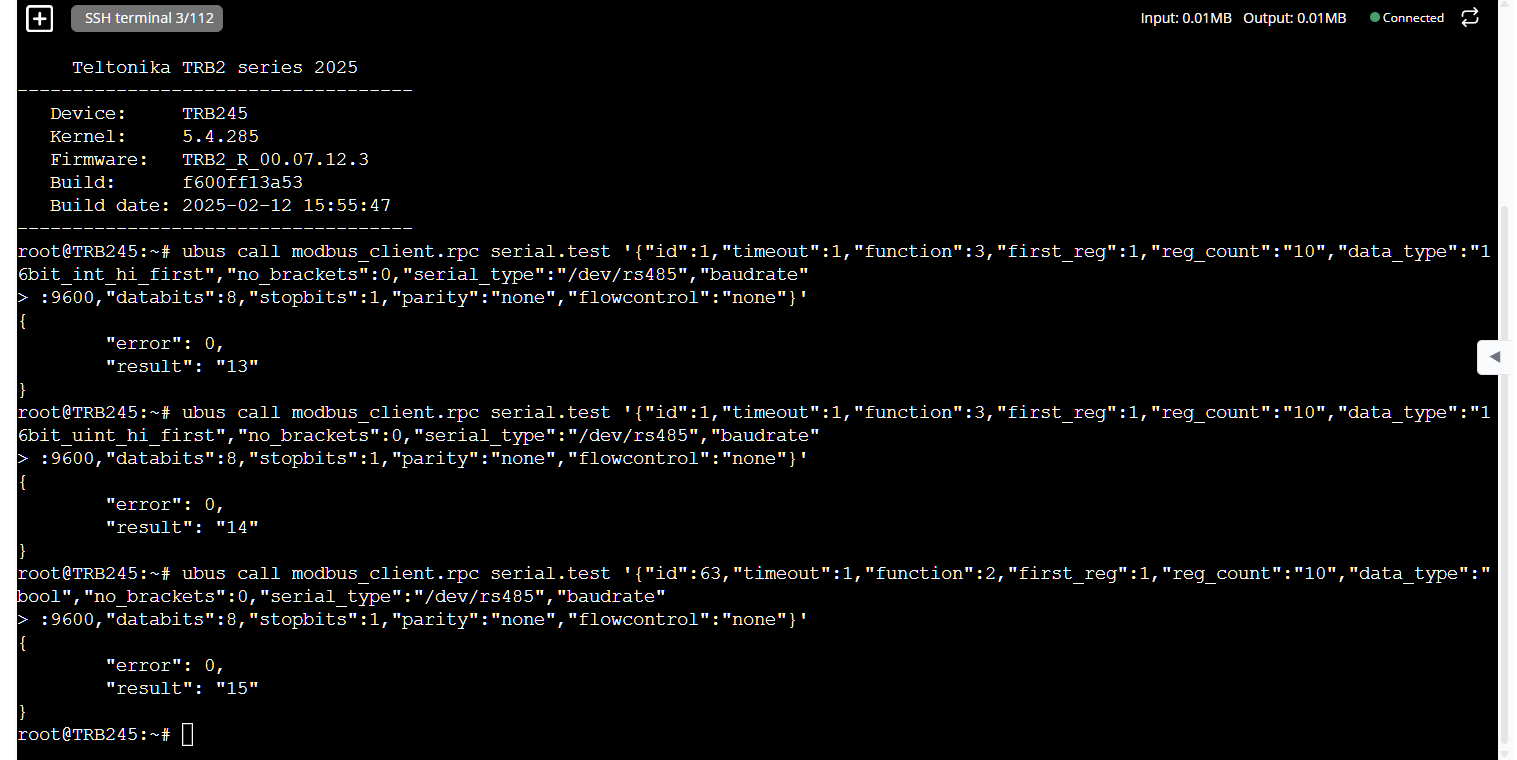
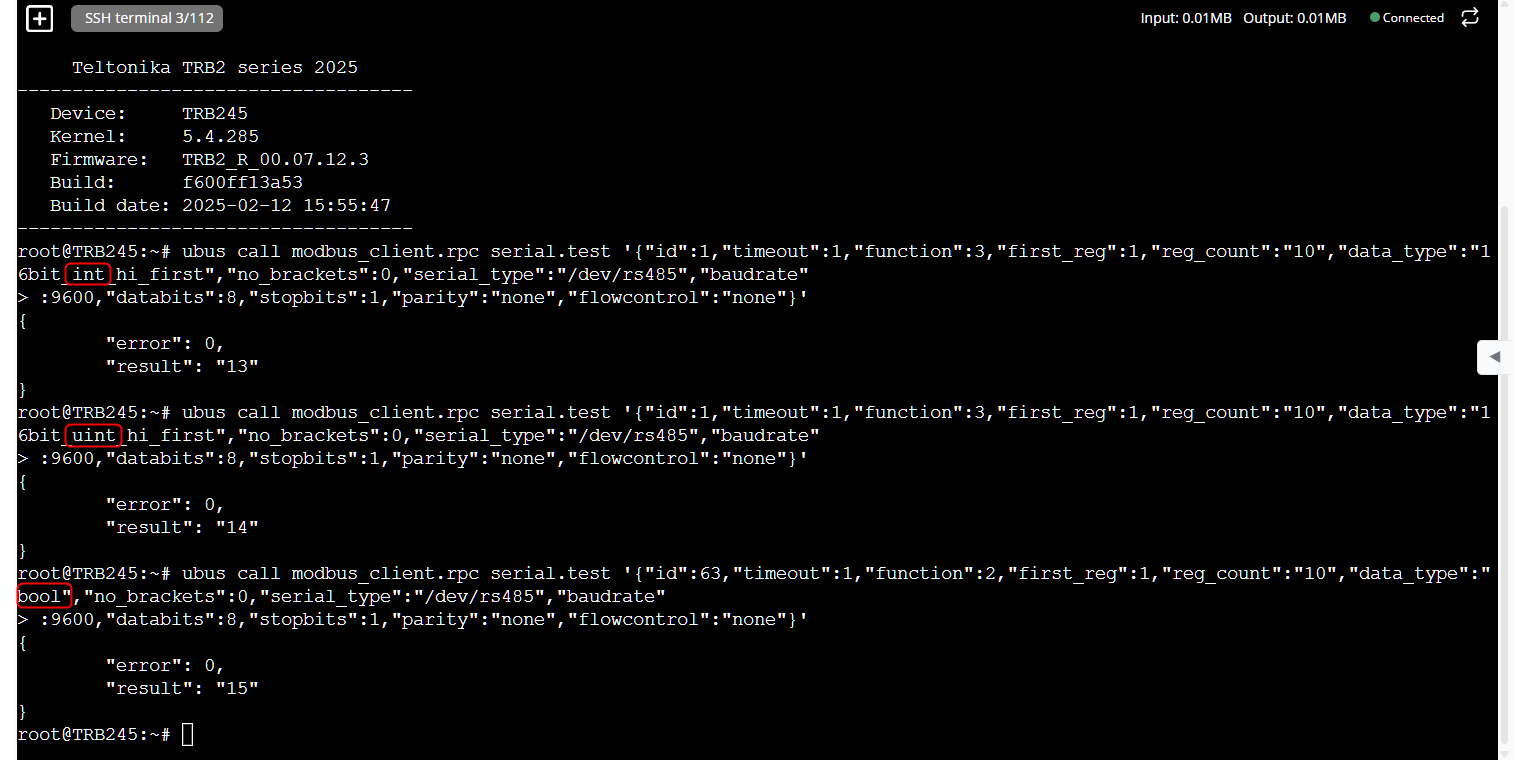
this ubus command is for sensors
ubus call modbus_client.rpc serial.test '{“id”:1,“timeout”:1,“function”:3,“first_reg”:1,“reg_count”:“10”,“data_type”:“16bit_int_hi_first”,“no_brackets”:0,“serial_type”:“/dev/rs485”,“baudrate”
:9600,“databits”:8,“stopbits”:1,“parity”:“none”,“flowcontrol”:“none”}’
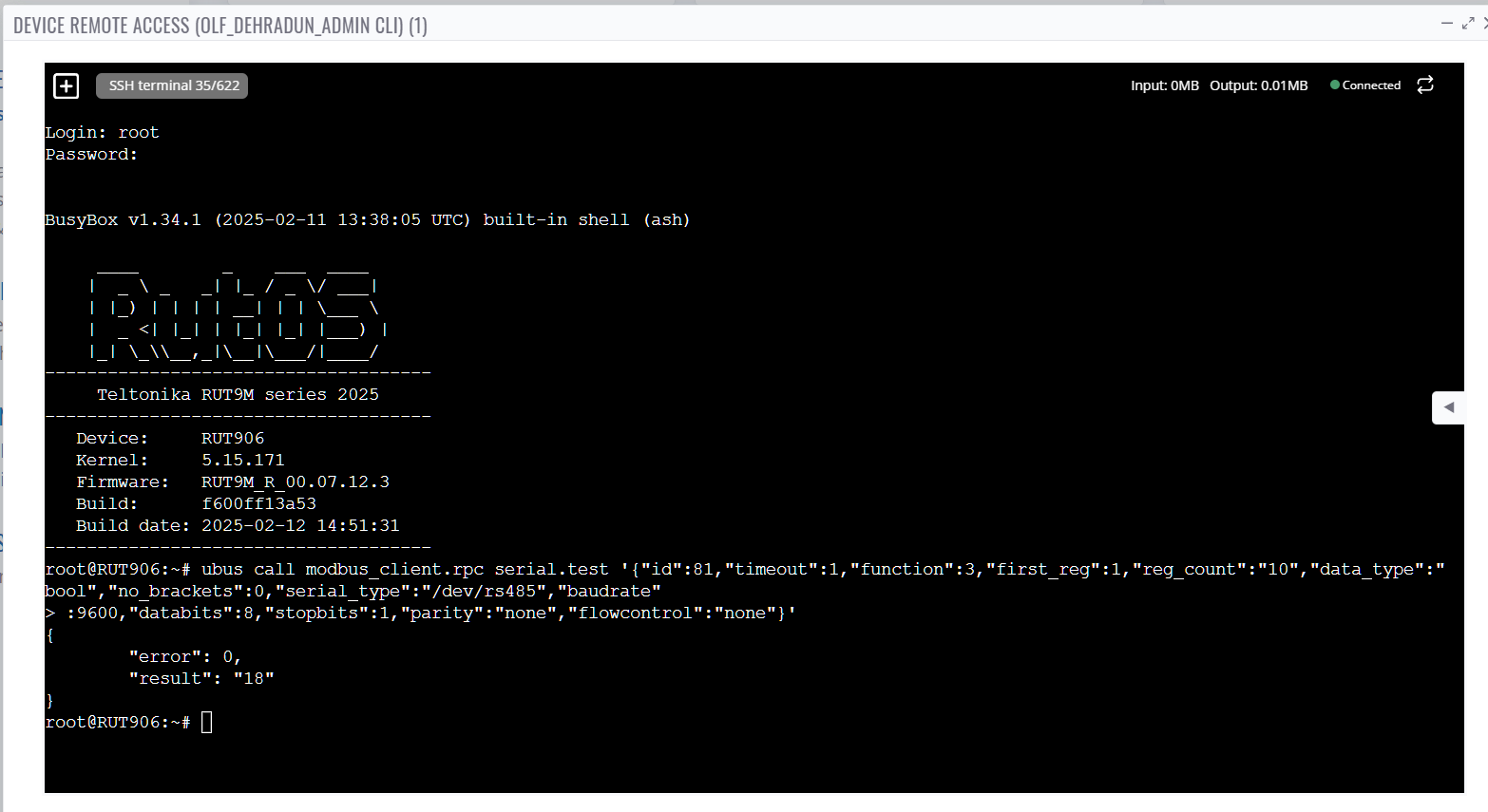
this ubus command is for plc
ubus call modbus_client.rpc serial.test '{“id”:63,“timeout”:1,“function”:3,“first_reg”:1,“reg_count”:“10”,“data_type”:“bool”,“no_brackets”:0,“serial_type”:“/dev/rs485”,“baudrate”
:9600,“databits”:8,“stopbits”:1,“parity”:“none”,“flowcontrol”:“none”}’