I have an FMC920 on a boat wired and configured so that it is considered to be moving when battery power is on.
For lengthy periods the boat will be on a mooring with the battery off and I know where it is so I don’t need GPS location reports. Periodically the battery is switched on, the boat goes off and does something, locations are reported and I know where it is. That’s all fine.
At the end of the day the boat goes back to its mooring, the battery is switched off and I have the device configured to go into ultra deep sleep, which it does.
But the thing is that the boat is, when on its mooring, always moving if only slightly. The accelerometer detects this, takes it out of UDS and it starts (pointlessly) reporting again.
Is there a way to make sure it stays in UDS, such as turning off the accelerometer? Or damping the accelerometer so it ignores relatively small movements?
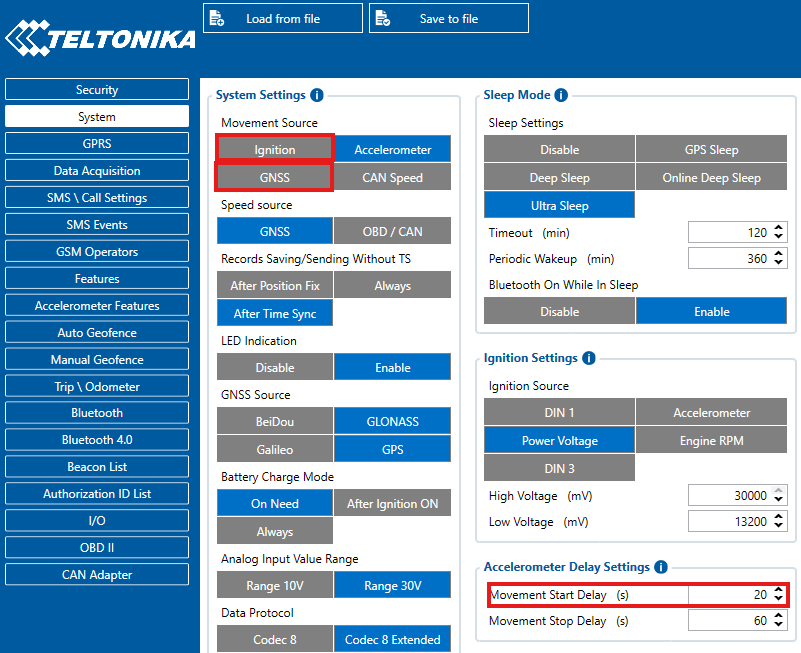
I hope you’re doing well. In the Movement Source settings, you can configure the device to use Ignition, Accelerometer, or GNSS.
If you’re using an accelerometer, you can adjust the delay settings to allow the device to detect movement after a specified period. Alternatively, you can switch to Ignition or GNSS as the movement source.
Thanks for your reply. I understand about Movement Sources and the one I am using is Ignition.
However my question was about waking up from Ultra Deep Sleep. If my reading of your documentation is correct, and after experimentation I think it is, the accelerometer will wake the device from UDS regardless of Movement Source.
So if the device is in a boat that is ‘parked’ on its mooring and the boat moves around a bit,which they always do, then the accelerometer will detect this and wake it up. That means that it will report pretty much continuously, more so than when not in UDS! Until the internal battery is exhausted, if course.
The 60s accelerometer delay isn’t going to help. What’s needed is a way to disabled the accelerometer so the device stays in UDS until ignition is turned on again.
Thank you for your feedback. It is related to the Movement source that you have selected from the device and from that the device would identify if there is a movement.
Alternatively, I suggest connecting the device to the boat’s ignition source instead of its direct power source. This way, the device will only send records when the boat’s ignition is turned ON.
However, I say again that my question is NOT to do with movement source. It is to do with SLEEP MODE, specifically Ultra Deep Sleep. When in UDS, the device’s accelerometer, in effect, becomes the movement source and when it detects movement it wakes up the device and the device starts reporting its position. This is what the FMC920 documentation says and I have checked it to be correct by experimentation.
Now when a boat is on a mooring, where it can be for extended periods, it is effectively parked and not in use. Nevertheless it is in small but near constant motion due to the effects of wind, waves and current. This means that the accelerometer will always be detecting motion and waking up the device to transmit its position until the internal battery is exhausted. This is imho unnecessary and undesirable.
What I’m looking for, but not finding, is a way to turn the device off completely until power is restored. I find it surprising that this option is not available because there must be many other use cases to which it is applicable.
But possibly I am missing something in the documentation in which case please put me right.
Thank you for your detailed explanation. For all the options in Sleep Mode, the device would wake up once it detects movement from the device; thus, if the boat is moored, the device would wake up.
Since you required a way to turn the device off completely until power is restored, from the Configuration standpoint, we could not set the device as per your requirement. However, as mentioned in the previous comment, you can connect the device to the boat’s ignition source instead of its direct power source. This way, the device will only send records when the boat’s ignition is turned ON.
Keep in mind that since the device is turned off during the Boat ignition is OFF, you would not receive any records from it.
Good day! The concept is that since you want the device to send when the Ignition is ON, we could try to connect with the Boat’s Ignition source so the device would only work when the Ignition cable is ON. Otherwise, the device will be OFF.
The workaround mentioned above can be achieved through the Physical Wiring of the device.
As you mentioned, boats do move when in mooring due to waves. This can be ignored by activating static navigation filter which filters out small GPS jumps when the boat ignition is off. Alternatively as advised change movement source to ignition.
Hope that helps.
Patrick - I’m sorry but I can’t see how to use this information.
ConfigMate - I consider myself to be of reasonable intelligence but nevertheless, having read the documentation on Static Navigation Settings several times, I really can’t understand what it is telling me. As I have said previously, MOVEMENT SOURCE IS IGNITION. Suppose I enable Static Navigation and select both Sources and that “Filter” means “ignore”, then it seems to me that the documentation reads “The FMC920 ignores track jumps if ignition is off.”
That begs the question of “what is a track jump?” but also, how does this fit in with the accelerometer waking the device from Ultra Deep Sleep? Does it wake up, recognise a track jump and go back to sleep?
Actually I’m hoping that Sleep Mode set to Disabled means not that the device does not enter sleep mode and instead stays active, but rather that the device is truly OFF and does nothing until ignition is back on.