Hello,
I am currently experiencing challenges with the data transmission logic on my Teltonika FMC650 device, particularly in relation to the CAN bus data handling.
- Inconsistent Data Recording: I am utilizing two different CAN lines for data transmission. While some data segments have cycle times as low as 10ms and 50ms, others have cycle times of up to one second. The device sporadically includes these one-second cycle data points in the records—sometimes they are recorded, and other times they are omitted for periods extending up to an hour. Although our analyzer software confirms the receipt of data from the vehicle, the Teltonika device intermittently fails to record it, only to resume normal function after prolonged delays. What could be causing these inconsistencies, and how can I ensure reliable data capture?
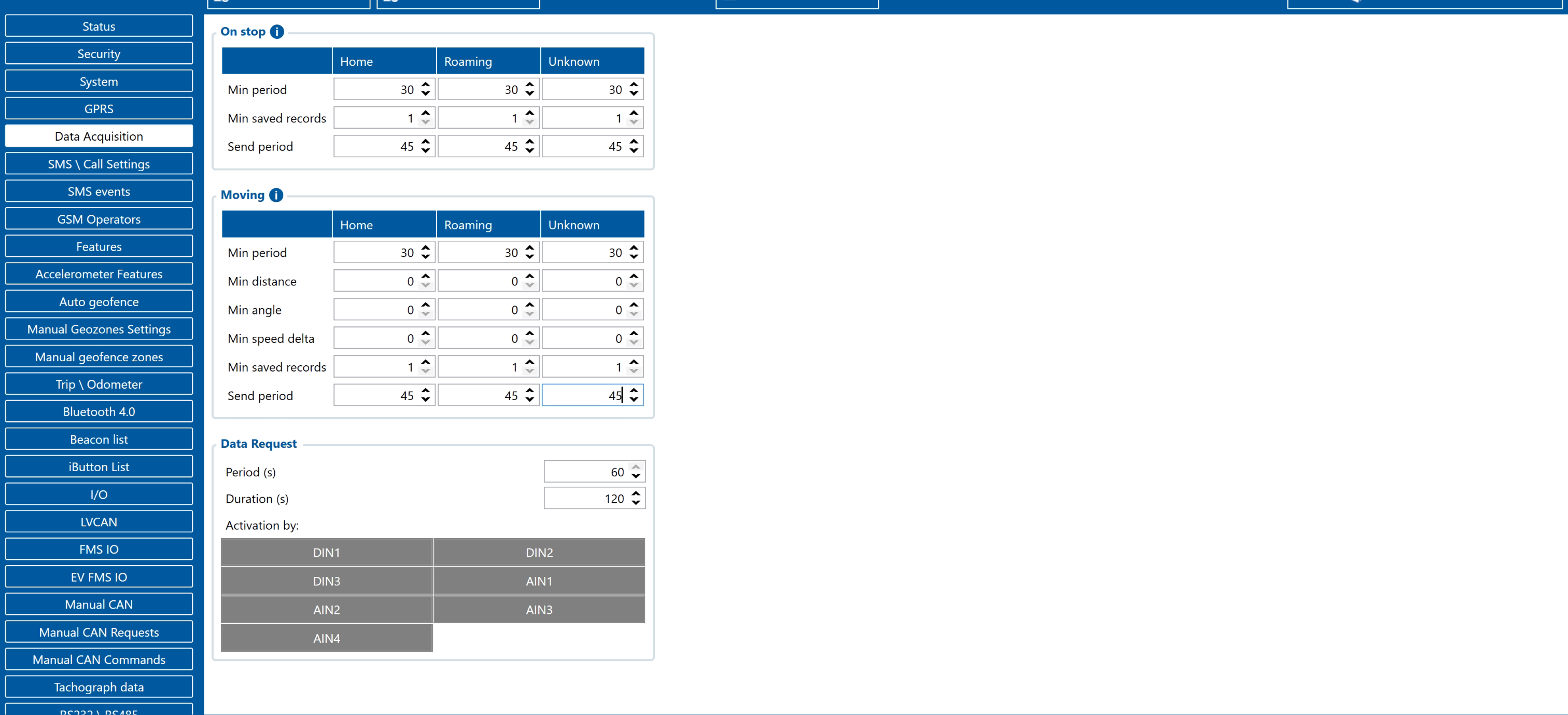
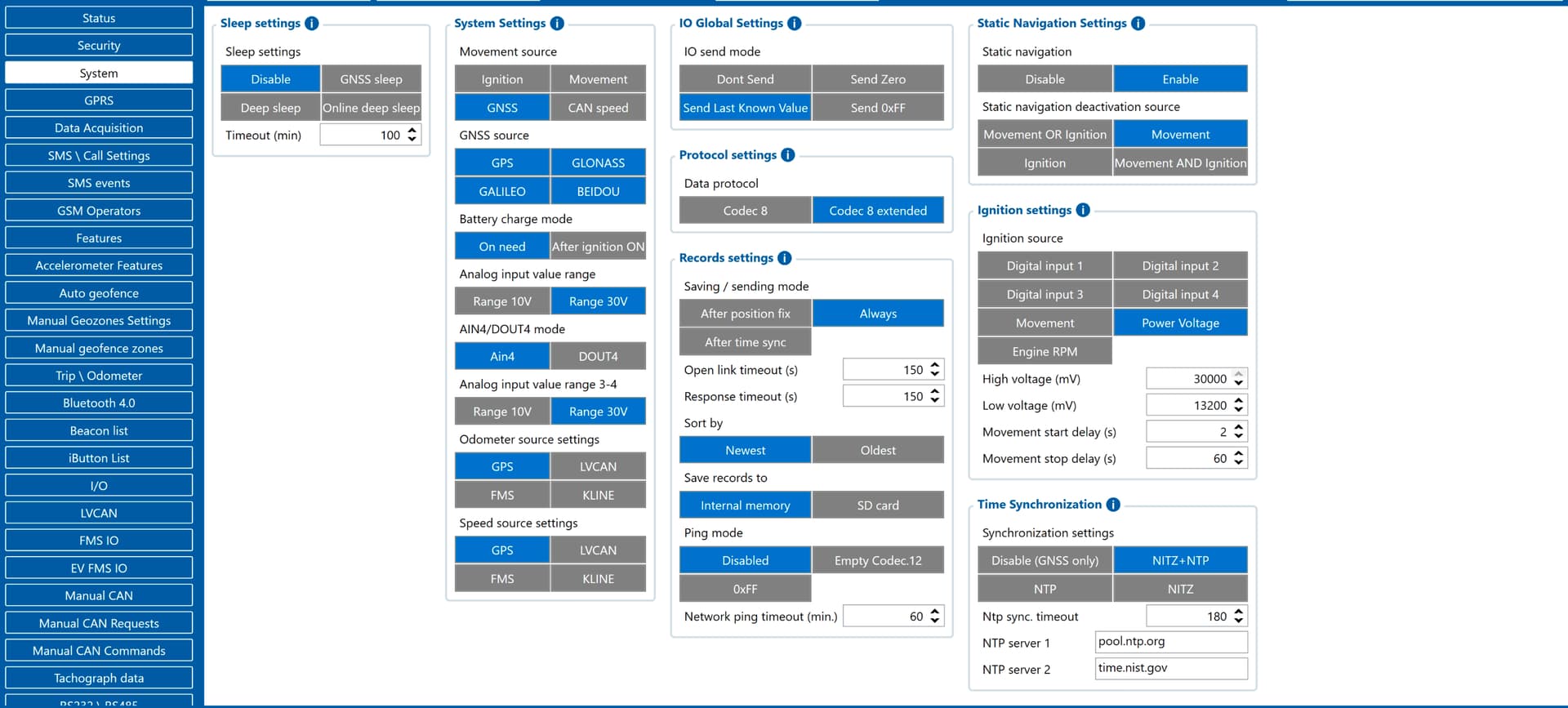
- Transmission Frequency Exceeds Settings: Despite configuring the minimum period for data transmission to 30 seconds and the send period to 45 seconds, the server continues to receive data every second. All IO priorities are currently set to “Low.” My objective is for the device to compile the CAN bus data and IO data every 30 seconds, thereby only sending the most recent data within this interval. What steps can I take to correct this issue and achieve the desired transmission frequency?
I am adding current configuration as attachment.
I appreciate any insights or recommendations you could provide to help resolve these issues.
Kind regards,
Doruk Arslan