Edit: After thinking about this a bit more, I’ve concluded that my best option is -
When igmition is on, report current position after 100m movement or 600 seconds, whichever is sooner.
When ignition is off, go into a sleep mode.Report position ever 3600 seconds or not at all.
I’ve read and reread the documentation and frankly I can’t figure out how to set this up. Does anyone have a simple example of tracking an object moving relatively slowly, stopping and starting?
I want to track small motorboats with FMC920s installed. They will mostly be moving slowly ~5Kn, occasionally move more quickly ~20Kn and be stationary, with or without engine on, for periods. When moving I’d like them to report about every 3 mins, when stationary about every 10 mins.
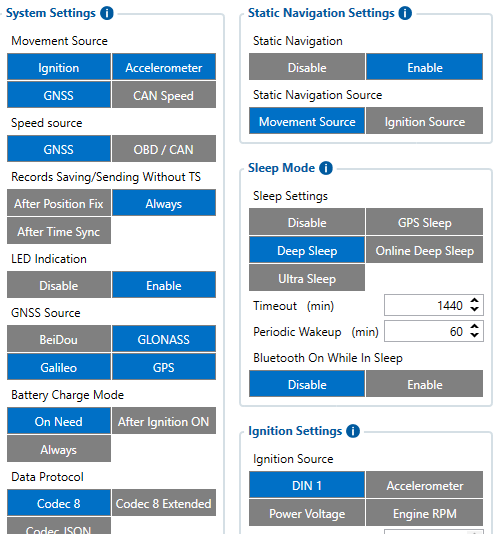
In the “Movement source” section, you have configured the detection of movement for motorboats through “Ignition”, “Accelerometer”, or “GNSS”. In principle, this configuration is correct. However, it is important to note that when any of these three movement sources are activated, the device will generate a record with AVL ID 240 indicating that the vehicle is in motion.
In the case of motorboats, selecting the “Accelerometer” movement source may result in false events. This is because, even when the boat is stationary, wave motion can trigger the accelerometer and record vehicle movement. I recommend conducting tests and deactivating this option if necessary.
In the images, I see that one of the “Sleep modes” is activated. This feature allows the device to enter a power-saving mode, especially when parked or not in use for long periods. If you do not require this function, you can disable it by marking it as “Disable”.
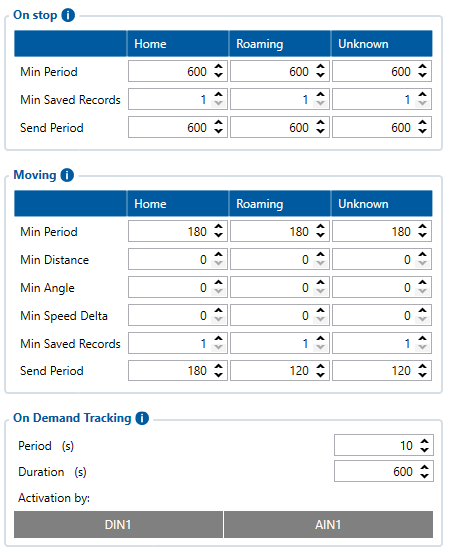
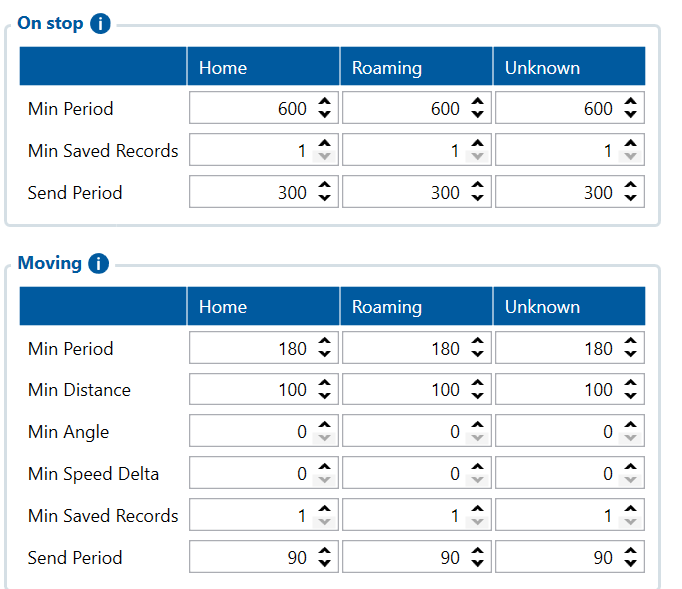
Furthermore, in the “Data acquisition” tab, you can configure the frequency at which the device will send records when it is “on stop”, meaning when the movement source is not activated (taking into account the aforementioned configuration). If you need the device to send a record each time it travels 100 meters or every 600 seconds, and to generate records every 600 seconds when it is off or not in motion, your configuration should resemble the one shown in the attached image:
Many thanks for that – exactly what I was looking for.
However I now have a few follow on questions.
Am I right that on the System tab, Movement Source is how the device decides whether it is moving or stopped, and that a Movement Source of Ignition means that device considers it is Moving if it is receiving 12v DC and if it isn’t it is On Stop? If so then I just need Ignition.
On the Data Acquisition tab, if the device is On Stop it will send a position report at regular time intervals for the (back on the System tab) Sleep Mode timeout period. If the device believes it is Moving, I can set it to send a report after it has travelled a certain distance or after a period of time, whichever is the sooner. Is that correct?
On Stop, after the timeout period, the device goes into the selected Sleep Mode (I’m thinking Deep Sleep) and optionally wakes up periodically to send a report then goes back to sleep, presumably until the power comes back on again. Correct?
On Data Acquisition, how do Min Period and Send Period work? If I want to send one record every 300s, do I set Min Period or send Period to 300?
Finally, what are the best Static Navigation Settings for small boats moving erratically?